|
Celia Zhang
I’m a CS undergraduate student at Purdue. Email / Google Scholar / LinkedIn / Github |

|
ResearchMy research focuses on foundation models for robotics. I am particularly interested in how large-scale training can endow robots with strong generalization and the ability to handle complex tasks. More concretely, my interests include leveraging pretrained models to help robots better understand the physical world, improving the data efficiency of imitation learning under limited demonstrations, and enabling closed-loop control through environment interaction. |

|
Large Video Planner Enables Generalizable Robot Control

Boyuan Chen*, Tianyuan Zhang*, Haoran Geng*, Caiyi Zhang*, Peihao Li*, Kiwhan Song, William T. Freeman, Jitendra Malik, Pieter Abbeel, Russ Tedrake, Vincent Sitzmann, Yilun Du In Submission Website / ArXiv / HuggingFace First open video model at a foundation-model scale for generative robotics planning. |
Experience |

|
LiberAI
Research Intern, Jan. 2026 ~ Apr. 2026 Worked on building robotics foundation model for bi-manual dexterous manipulation: Demo Mentor: Fanqi Lin and Songming Liu |

|
ZhenFund | 真格基金
Investment Intern, Dec. 2025 ~ Apr. 2026 Covered early-stage investments in AI and Robotics. Joined portfolio company LiberAI as a research intern concurrently. Advisor: Emma Yin and Jiaqi Zhang |
|
Berkeley Artificial Intelligence Research (BAIR) Lab
Research Assistant, Apr. 2025 ~ Nov. 2025 Advisor: Prof. Jitendra Malik |
|
CoRAL Lab, Purdue CS
Research Assistant, Dec. 2024 ~ Mar. 2025 Advisor: Prof. Ahmed H. Qureshi |
Selected Projects |
| Leap Hand VLA in Simulation Rebuilt the DexGraspNet data collection pipeline in isaaclab to generate large-scale training data for dexterous hand manipulation. The pipeline supports VLA training across multiple model families including SmolVLA, OpenVLA, and the Pi series. |
|
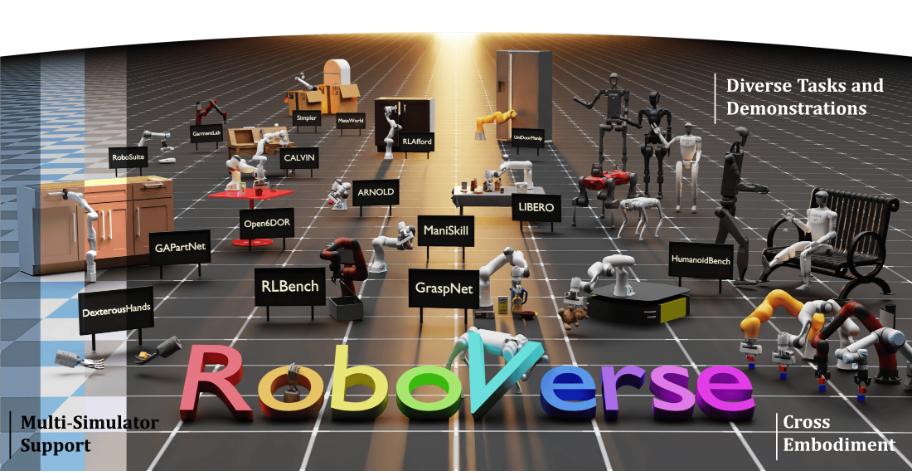
RoboVerse
 A unified simulation and benchmarking framework for robot learning, enabling scalable data generation, cross-simulator interoperability, and consistent evaluation to advance imitation learning, reinforcement learning, and sim-to-real transfer.
A unified simulation and benchmarking framework for robot learning, enabling scalable data generation, cross-simulator interoperability, and consistent evaluation to advance imitation learning, reinforcement learning, and sim-to-real transfer.
|
Awards |
|
Misc |
|
Outside of research, I enjoy piano🎹, singing🎤 and reading📖, especially poetry.
I have been writing Chinese lyrics since middle school, evolving from early independent creations to contributing to soundtracks (OSTs) for radio dramas and TV series, with over 100M✨ total plays across platforms. I have also been thinking about building a portfolio website for my lyrics, and would be happy to hear any thoughts or ideas :) |